Velodyne 32C ULTRA Puck数据采集总结
设备介绍
velodyne 32C 激光雷达传感器是32线的用于激光点云采集的设备,它有以下特点:
- 200m测量范围,精度为±5cm (<50m)和 ±10cm(50m-200m)
- 水平视场360°, 垂直视场40°(-25°至+15°)
- 水平角分辨率: 0.1°-0.4垂直角分辨率: 0.33°
- 旋转频率: 5HZ-20HZ(默认为RPM=600,即10HZ)
- 工作电压: 10.5V - 18.0V
- 重量:930g
- 工作环境温度:-10℃ 至 +40℃
Velodyne 32C 采取双回波模式,每秒能产生约120万个三维点云坐标,可以较好捕捉到周围大环境的细节,其可以用在汽车自动驾驶、建图测量、测绘、高精度地图、机器人导航避障、环境3维建模和自动化等行业。
硬件组成
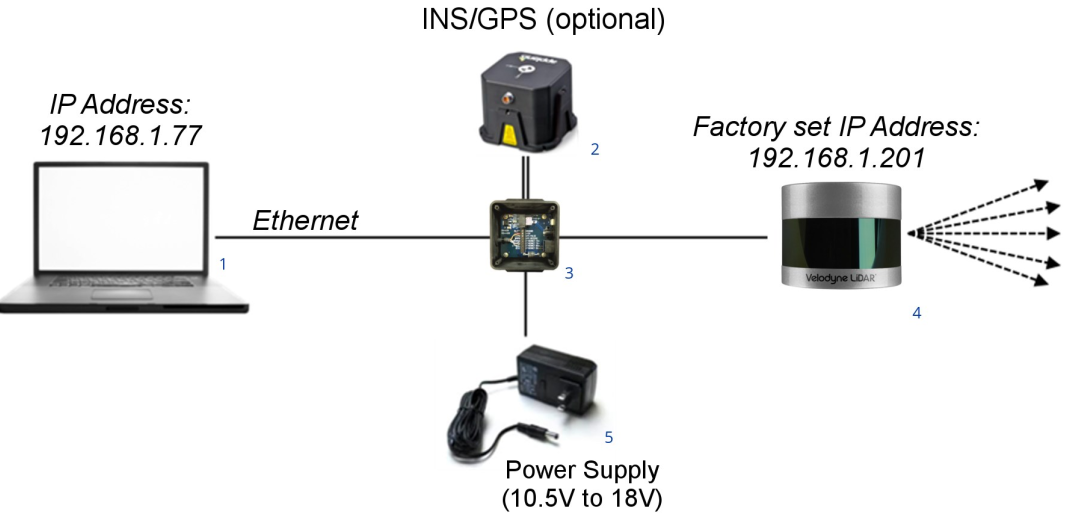
- 一台带以太网接口的笔记本或者台式电脑
- INS/GPS(可选)
- Velodyne 接口盒,含有以太网接口/GPS接口/电源接口
- 激光雷达传感器
- 交流电源插头
- 内含资料的U盘
配置使用及数据录入
步骤一:接口盒插上电源,再用Ethernet将接口盒和电脑连接起来。
步骤二:配置电脑的网络ip和子网掩码,以ubuntu18.04为例:
打开网络设置,新建有线连接
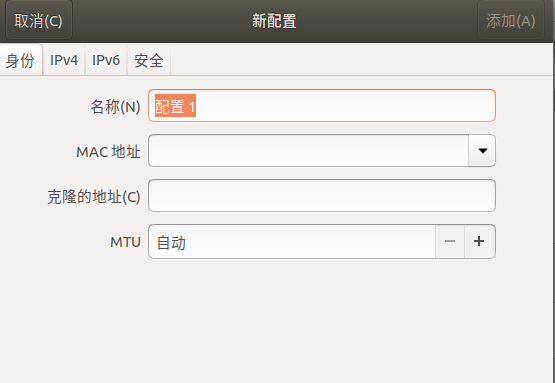
改名字,其他不用添加,接下来该ipv4配置

ip地址改成192.168.1.XXX(这里0-255都可以,除了201,因为201是激光雷达的ip),子网掩码改成255.255.255.0,右上角添加。最后能看到如下情形:

表示设置成功。
步骤三:打开浏览器,输入192.168.1.201进入激光雷达设置页面
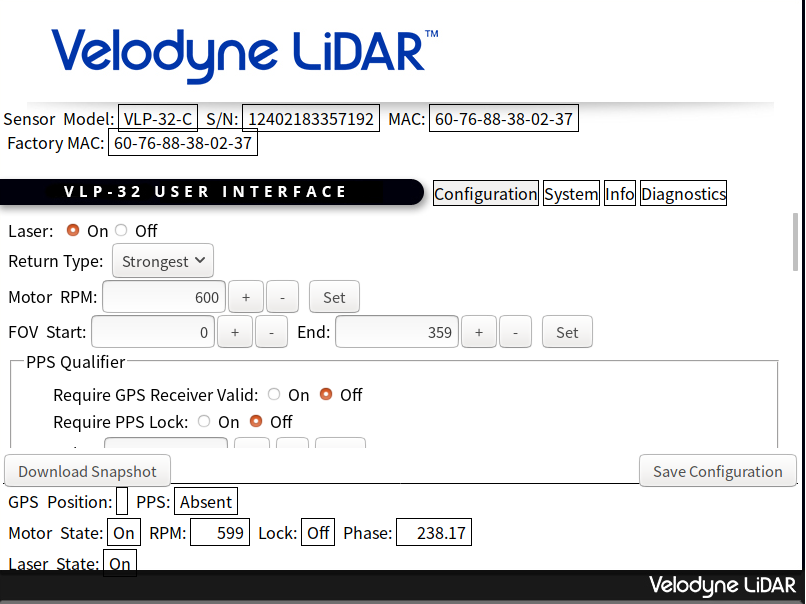
这里可以看到激光雷达详细的参数设置,包括硬件的温度、电流、电压情况等等都能找到,还可以更改旋转的频率(下方的RPM)。这一步骤一般按默认设置就行,具体每种参数的含义可以在这里的manual手册中找到。
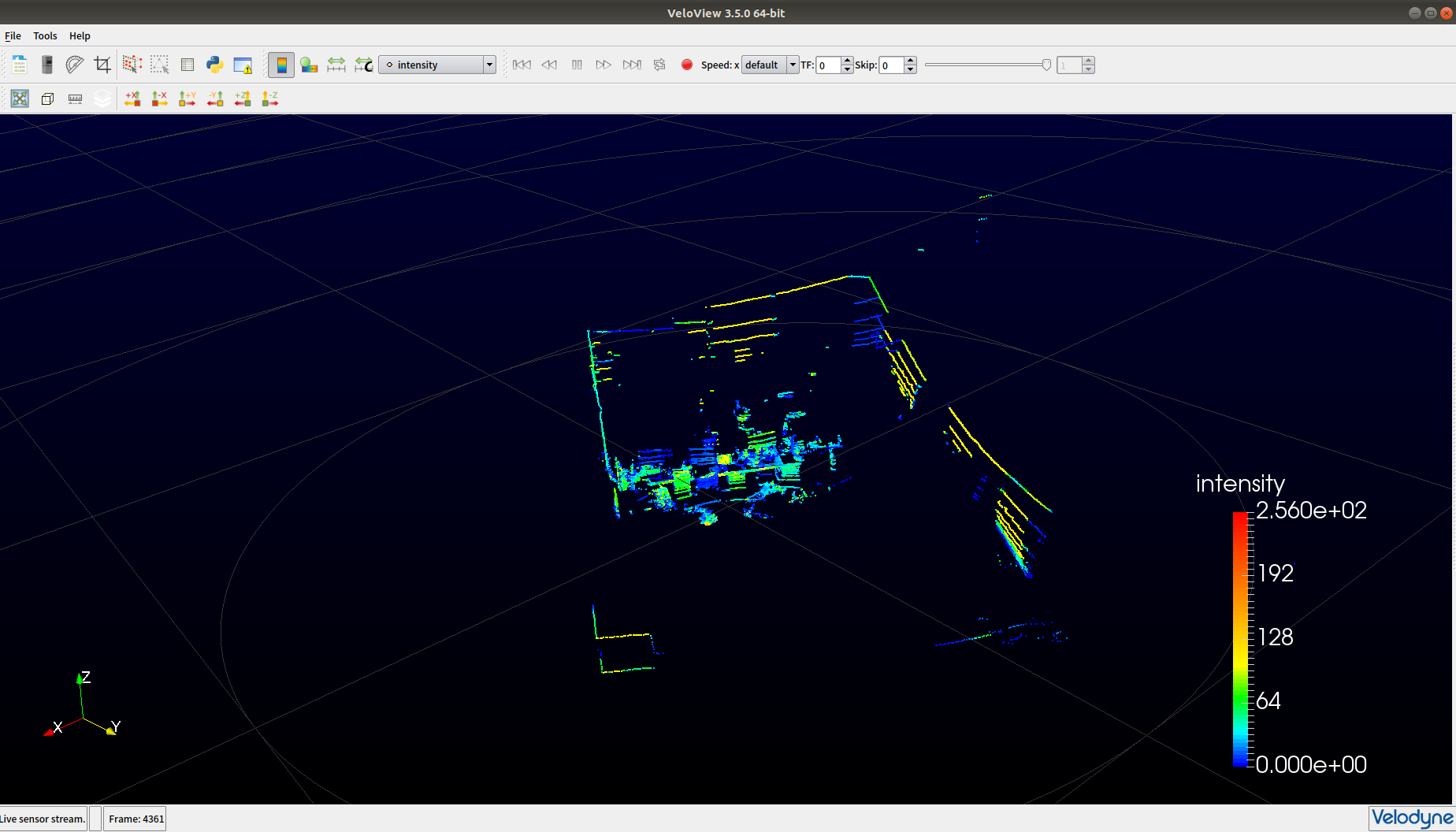
步骤四:在这里下载叫VeloView的软件,该软件在Win/Mac OS/Linux下都能用,这里以ubuntu18.04举例,下载tar文件后,解压到你想要放置的路径下,然后打开终端cd到该路径,运行
shu-math@shu-math: ~/luke/Velodyne_32/VeloView-3.5.0-Linux-64bit $ ./bin/VeloView
就能看到实时的点云了
步骤五:最后一步就是用ros将实时扫描到的点保存到rosbag中
新建ros工程
mkdir -p catkin_velodyne32/src
cd catkin_velodyne32/src
git clone https://github.com/ros-drivers/velodyne.git
cd ..
rosdep install --from-paths src --ignore-src --rosdistro melodic -y
catkin_make
source ~/catkin_velodyne32/devel/setup.bash
将u盘中的VLP-32c.xml复制出来,用gen_calibration.py转成ROS节点的xml文件
rosrun velodyne_pointcloud gen_calibration.py ~/desktop/VLP-32c.xml
再把生成的VLP-32c.yaml文件移动到catkin_velodyne32/src/velodyne/velodyne_pointcloud/params/ 目录下,
再修改catkin_velodyne32/src/velodyne/velodyne_pointcloud/launch/ 下的VLP-32C_points.launch文件,把第7行的<arg name=”calibration” default=”$(find velodyne_pointcloud)/params/VeloView-VLP-32C.yaml”>最后改成VLP-32c.yaml。
然后roscore
roslaunch velodyne_pointcloud VLP-32C_points.launch
rostop list -v 查看当前可用的topic,有个/velodyne_points名字的topic
rosbag record -O out /velodyne_points (表示只记录/velodyne_points这个topic的数据)
最终能在文件夹中看到out.bag文件,这就是要的数据文件。