点云上的卷积神经网络及其部分应用
主讲人: 李伏欣 Oregon State University
主页:http://web.engr.oregonstate.edu/~lif/
3D Deep Learning在哪些领域有需要
3D物体的表示形式
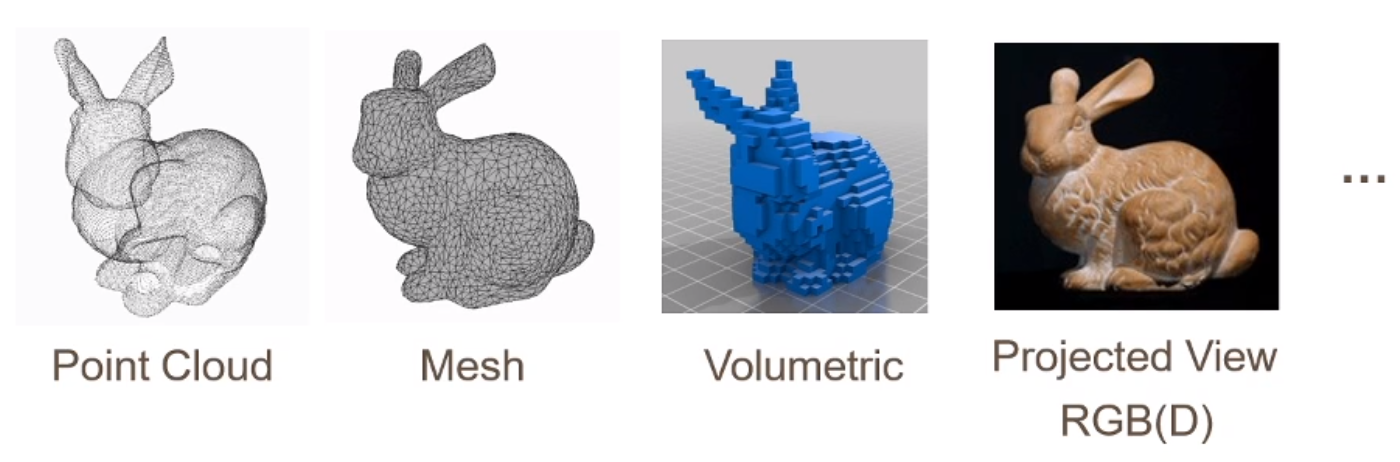
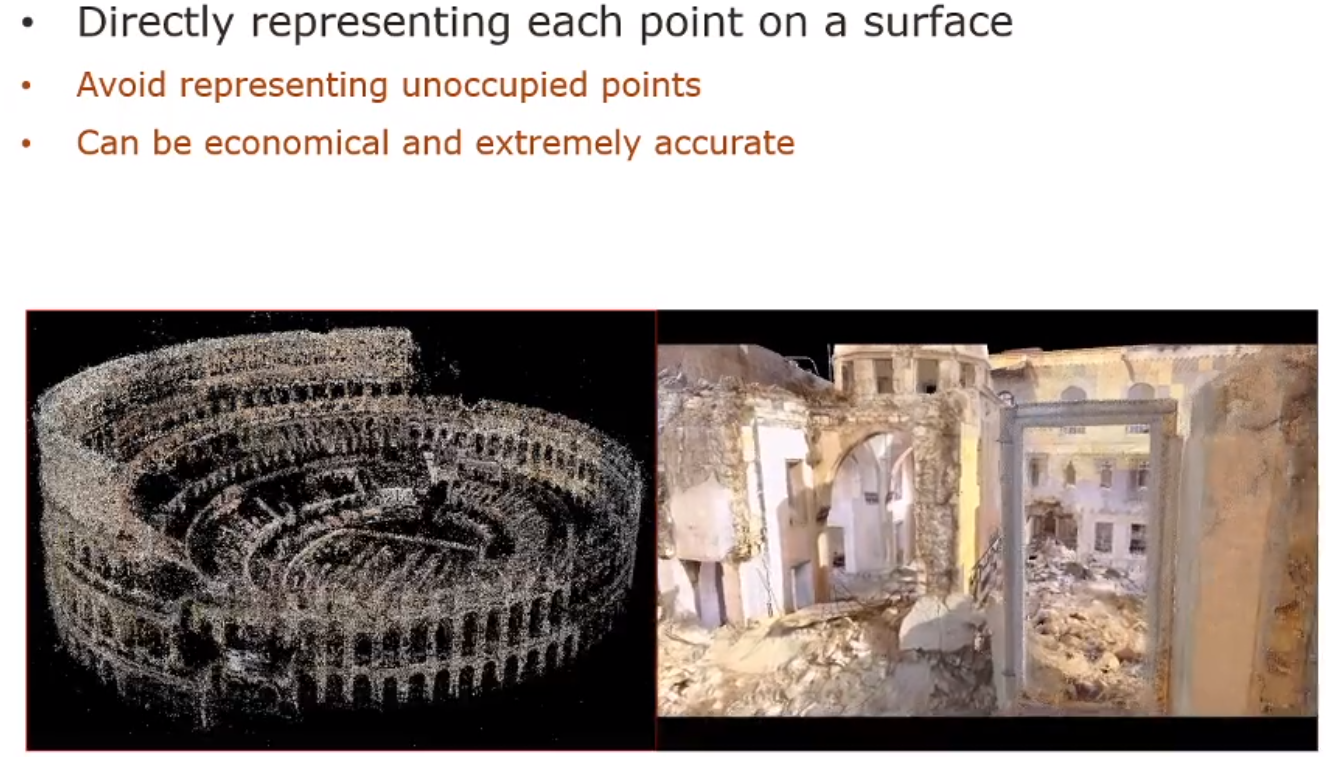
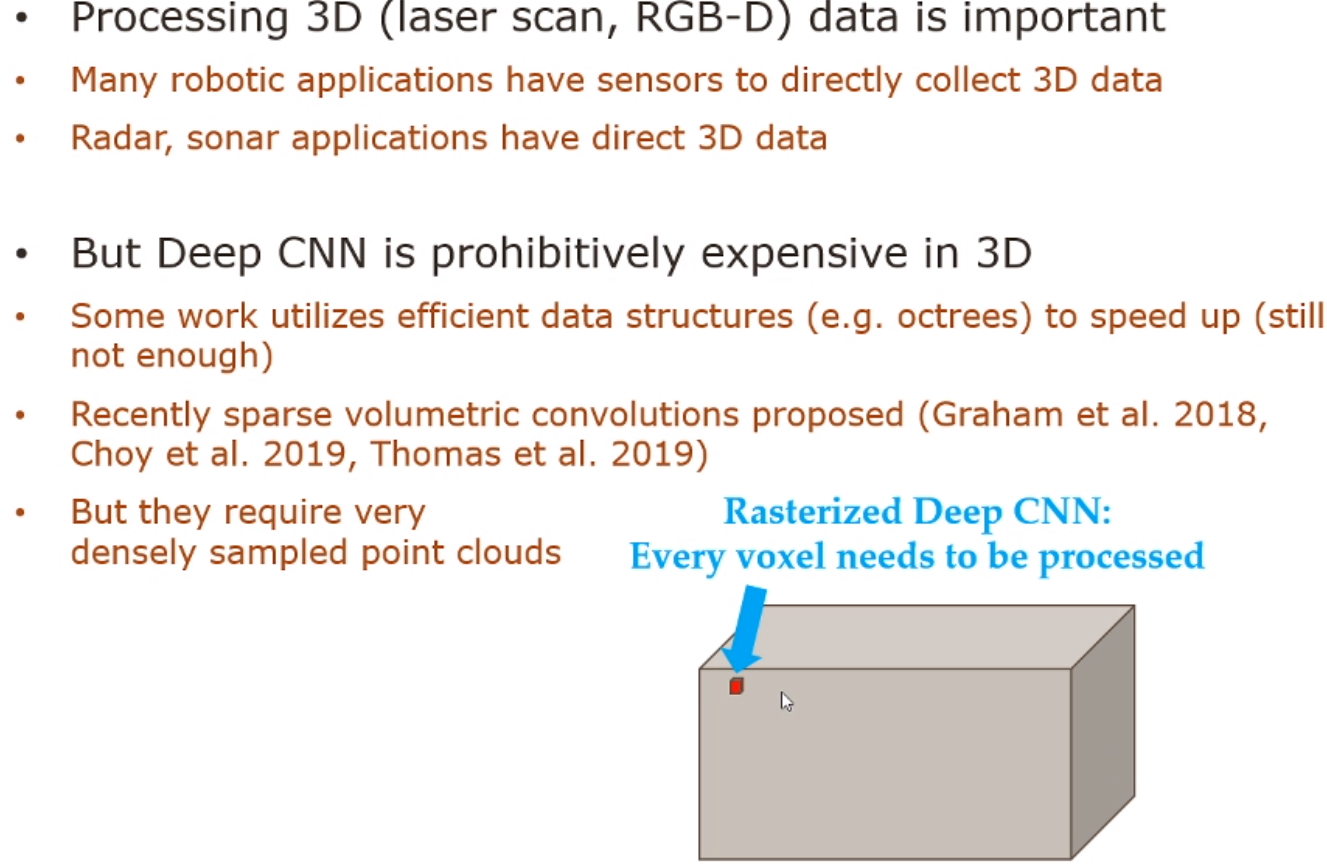
用点云来表示是因为点云是最直接的一种数据表达,是sensor能得到的最直接的信息,所以希望从点云去做一些research
点云难做的原因:图像的CNN是有固定的顺序规则,有序的
点云上深度网络最经典的工作是PointNet和PointNet++,但这不是真正的CNN
点云的问题在于点无法被定义order,得定义一些permutation invariant的操作,PointNet用1$\times$1convolution和max-pooling来进行无序问题的解决。
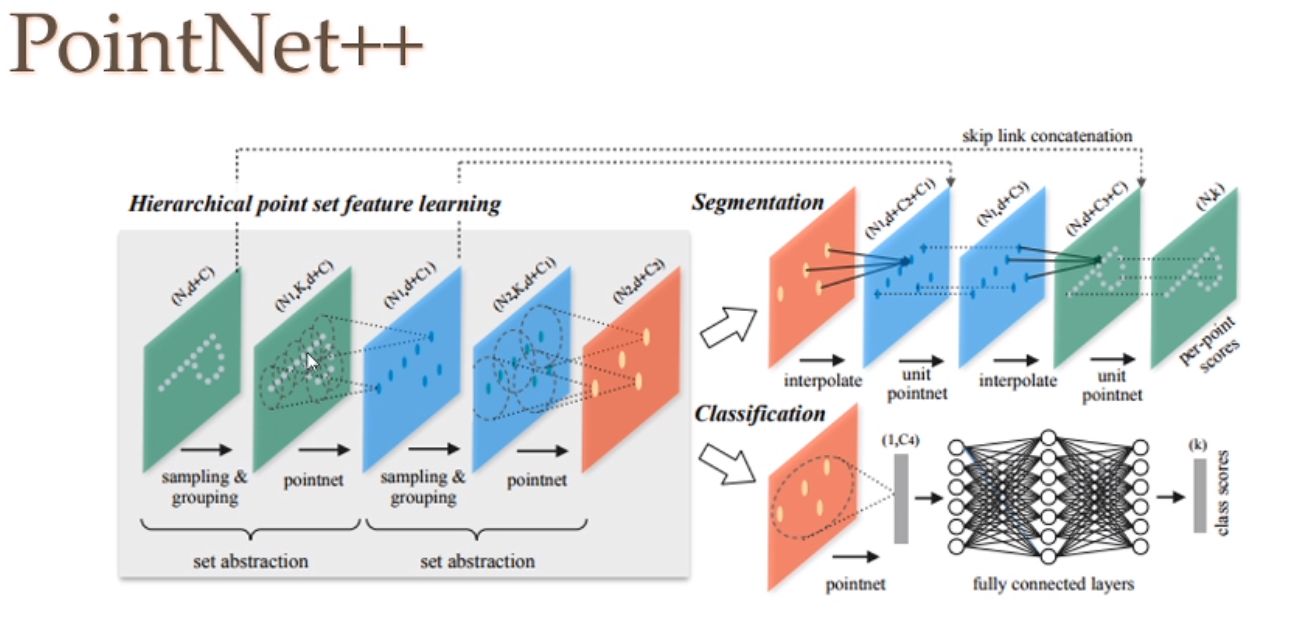
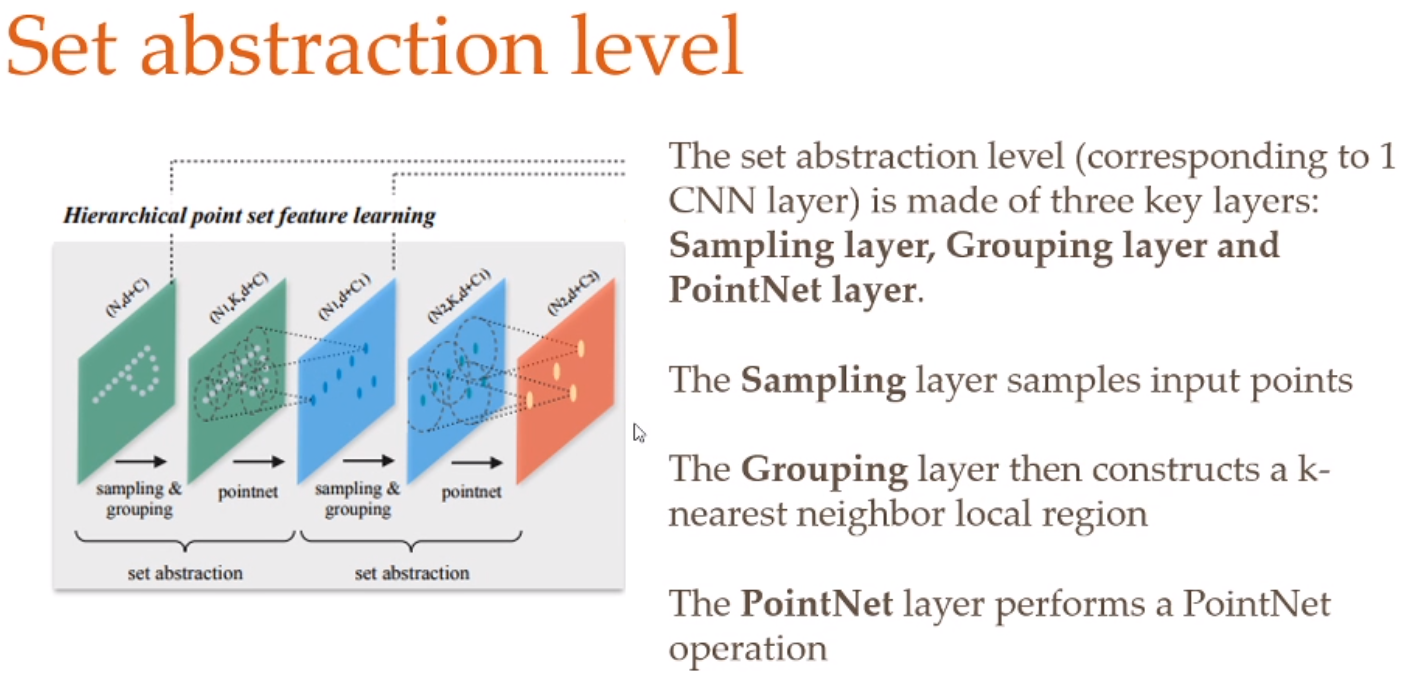
PointNet++加入了Neighbor的信息
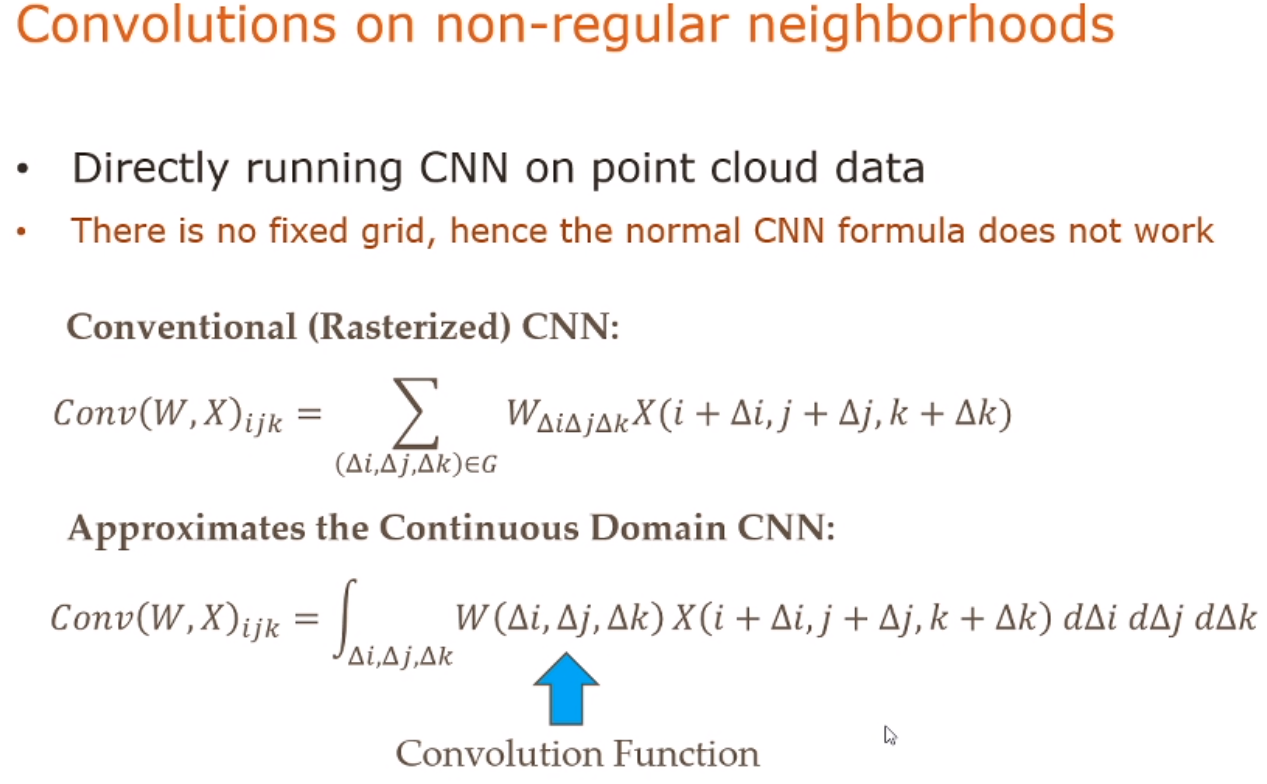
普通的convolution
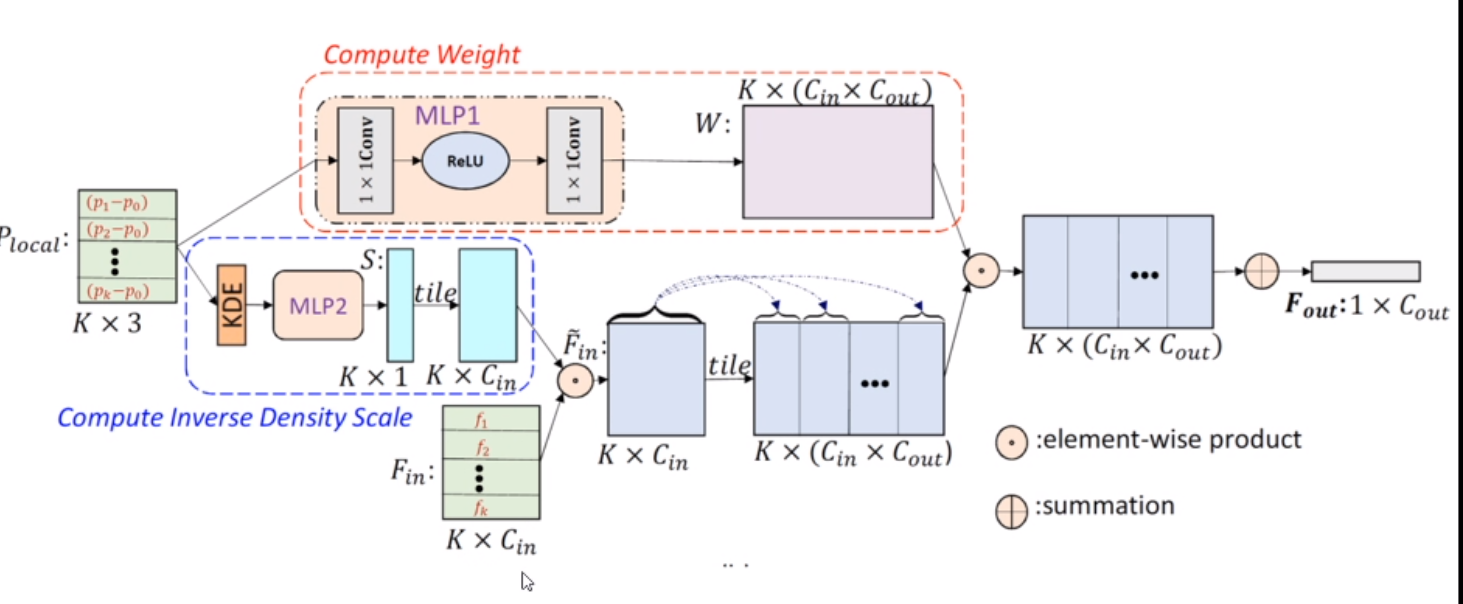
作者的PointConv介绍
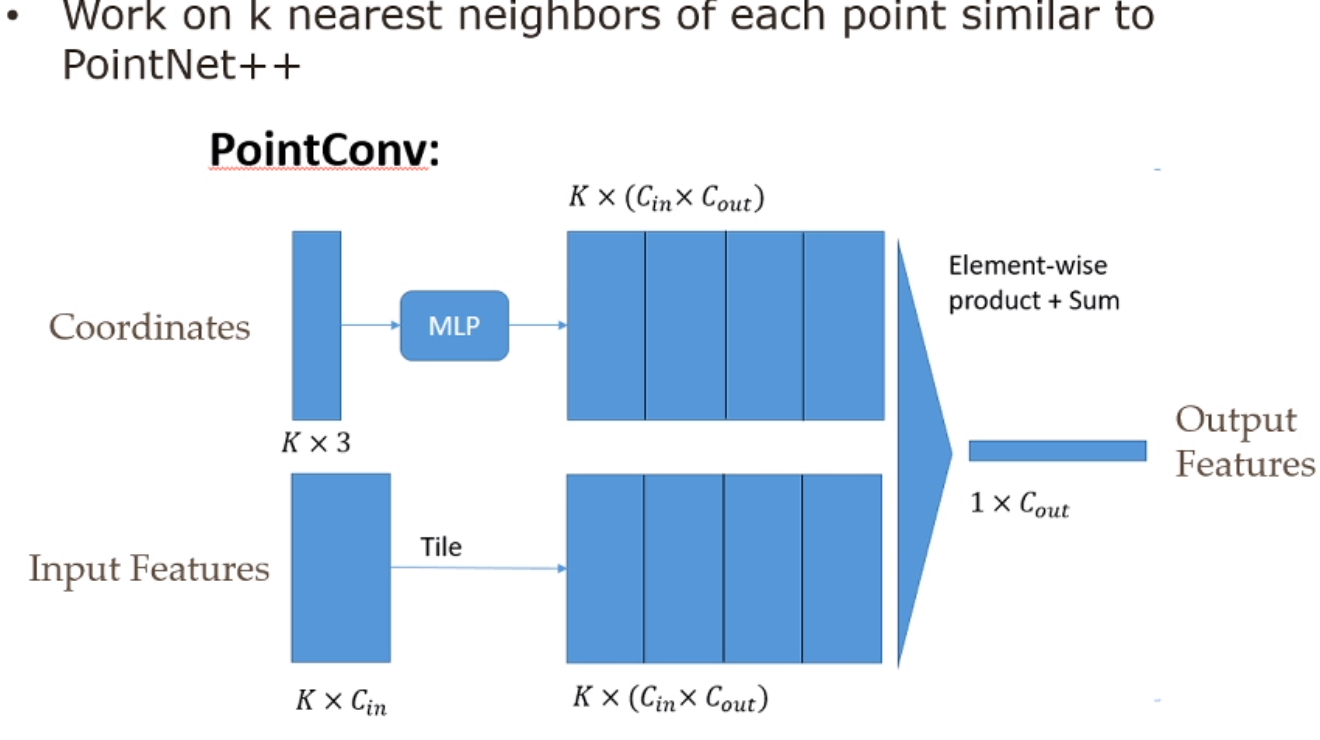
网络的整体框架
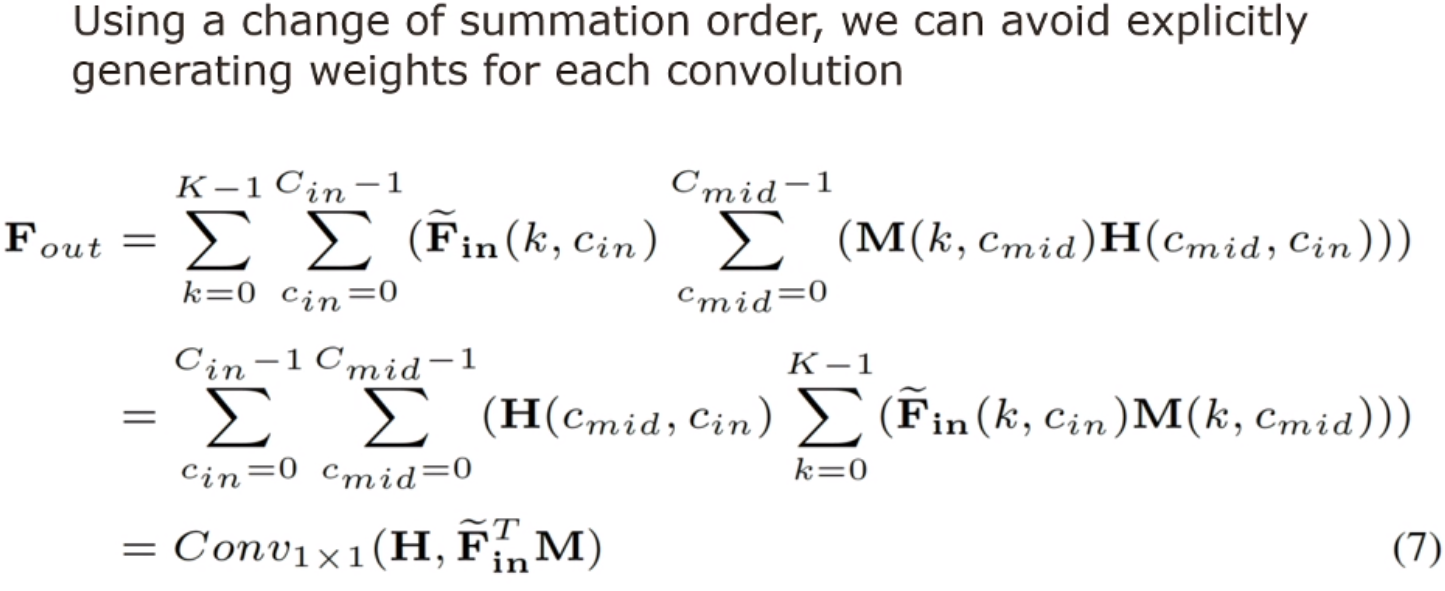
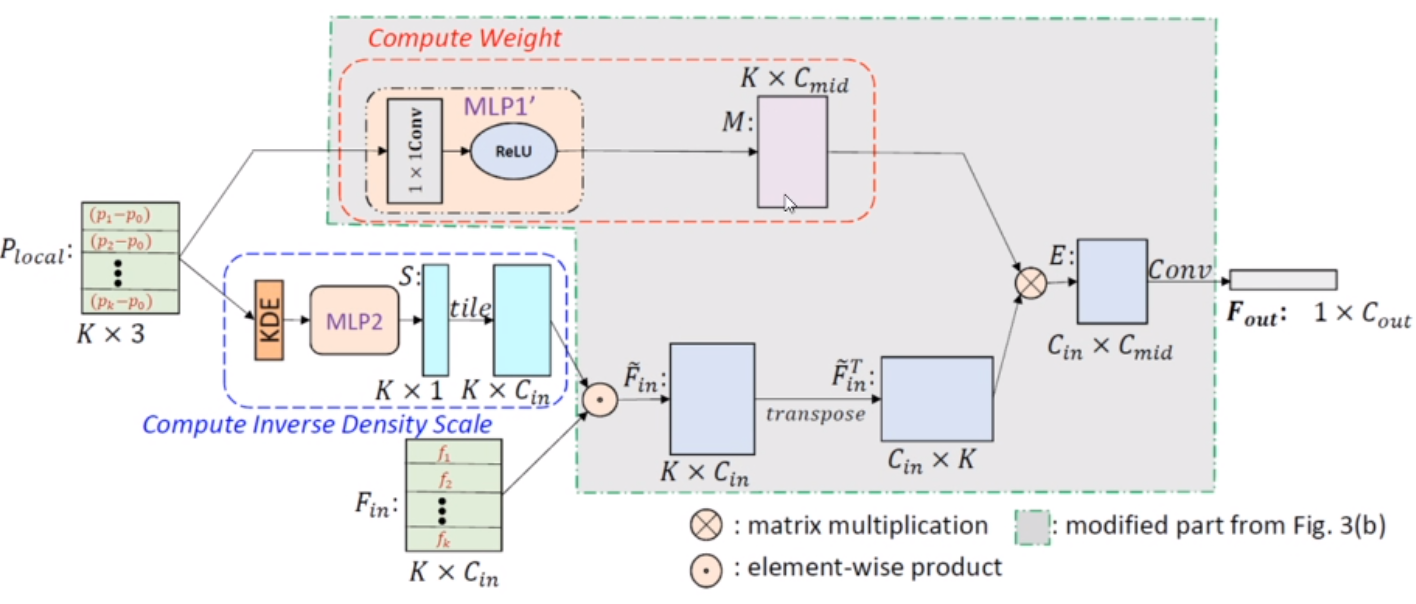
作者的改进
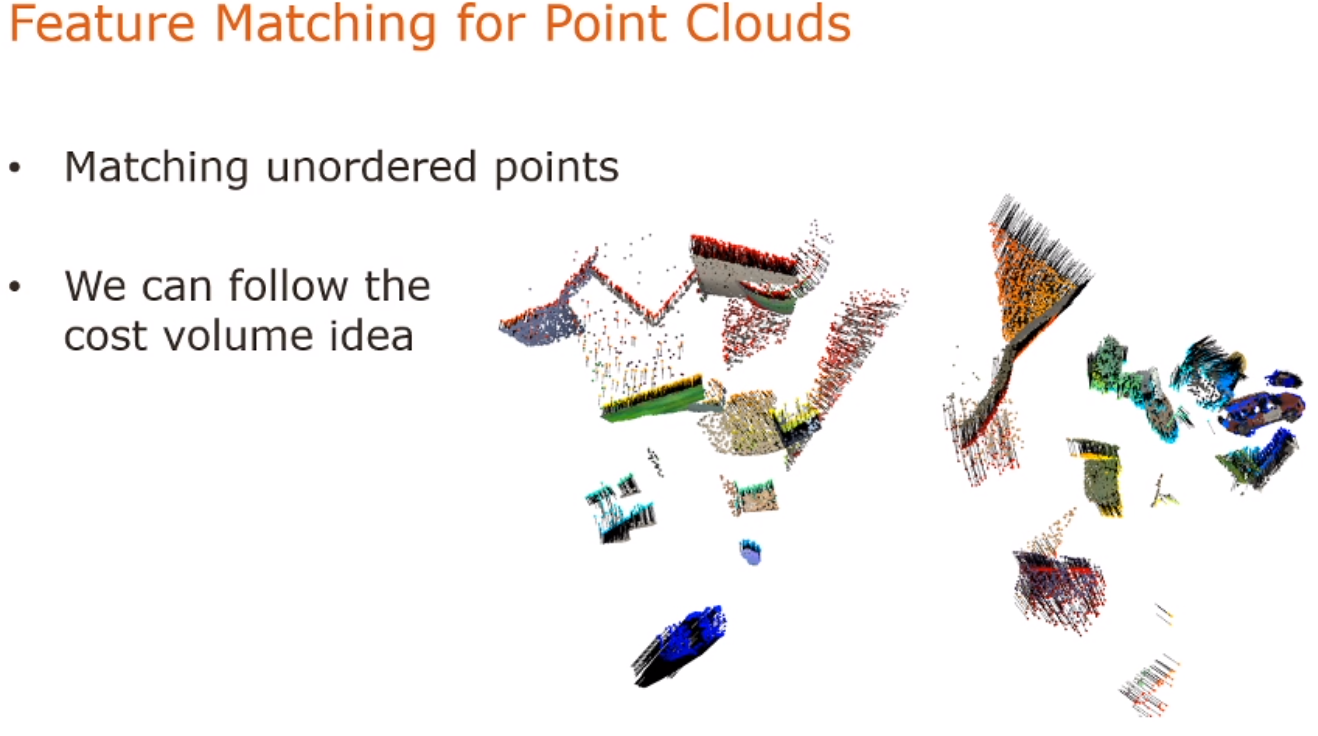
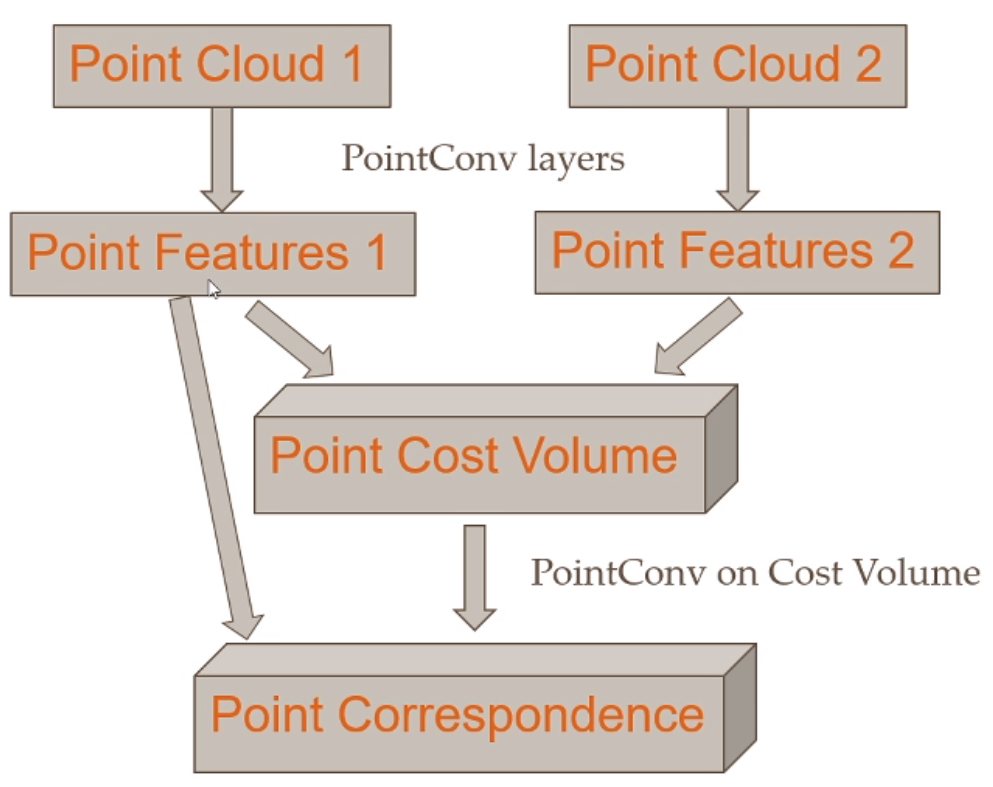
这段时间作者的工作,点云上的Feature Matching的问题
首先,基础的流程是
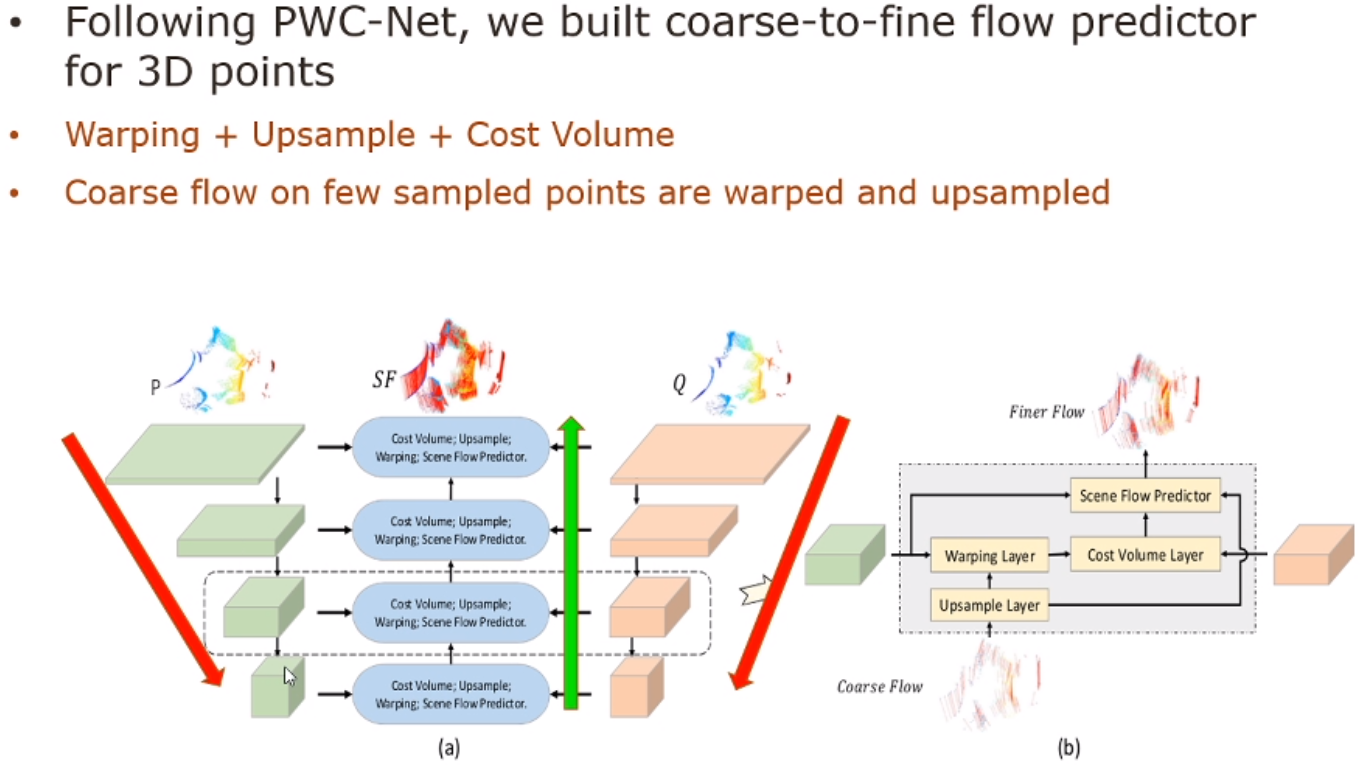
接着提出PointPWC-Net,得到点的motion
另一个有意思的工作就是考虑将点云进行smooth,因为发现不同物体点云的feature侧重在一些局部区域,如果cut掉了就会使结果错误。
